Credit: © Mark Wade. 22,192 bytes. 334 x 480 pixels.
| astronautix.com | R-56 |
|
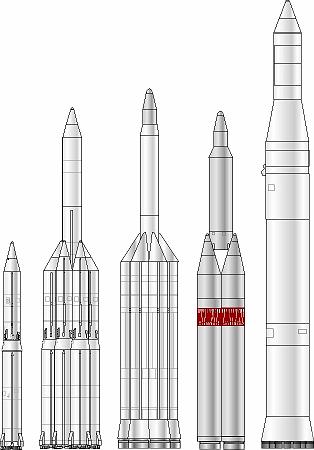
| R-56 Evolution - From left: R-16; SK-100; R-56 Polyblock A; R-56 Polyblock B; R-56 Monoblock (selected configuration) Credit: © Mark Wade. 22,192 bytes. 334 x 480 pixels. |
After drawing back from the 'cluster of R-16's' approach of the SK-100, Yangel conducted some trade studies to determine the optimum design for his bureau's first �super rocket�. The booster was to be capable of serving as a first-strike military global rocket or as a heavy launch vehicle, placing 40 tonne payloads into a 200 km polar orbit. The selected monoblock design could be transported on the Soviet internal canal system from the factory to the launch site.
The R-56 would have been 67.8 m long and consisted of three stages, the first two with a basic diameter of 6.5 m. The first stage had a flared 8.2 m diameter base to accommodate the 16 RD-253 engines.
By 1965 Yangel had decided that the bitter fight between Chelomei and Korolev over control of manned programs was damaging the Soviet space effort. He proposed a collaborative effort: Yangel would design and build the launch vehicle; Korolev the manned spacecraft; and Chelomei the unmanned spacecraft.
However this was not to be. The other Chief Designers objected that use of the R-56 for a manned lunar landing would require two R-56 launches in the place of one UR-700 or N1 launch. This would mean use of untried earth orbit rendezvous techniques to assemble the spacecraft in earth orbit. Development of the R-56 was not authorised, and for once in his career Yangel gave up the fight.
Yangel conducted some trade studies to determine the optimum design for his bureau's first �super rocket�. The booster was to be capable of launching a range of missions:
To achieve these design objectives, three design approaches were studied in detail:
The selected monoblock vehicle was 67.8 m long and consisted of three stages, the first two with a basic diameter of 6.5 m. The first stage had a flared 8.2 m diameter base to accommodate the 16 engines. These were developed by Glushko's OKB-456, and each produced 148 tonnes of thrust at lift-off. The thrust and technical characteristics indicate they would have been identical to or closely derived from the RD-253 engine developed for Chelomei's UR-500 rocket. Twelve of the main engines were fixed while four were gimballed in pitch to provide launch vehicle steering. Separate propellant tanks were arranged with the oxidiser forward tank forward, the fuel tank aft. It is said that the launch vehicle was equipped with a recovery system; this probably applied only to the first stage, which the figures indicate has an unusually high empty mass, perhaps including a means of recovering the stage or engine section for reuse.
 | R-56 Cutaway - R-56 Cutaway Drawing 12,905 bytes. 111 x 453 pixels. |
There were two versions of the third stage: a single start variant for placement of large payloads into low earth orbit, and a multiple start version for taking smaller payloads to high earth orbit or earth escape trajectories. It was equipped with a main engine of 50,000 kgf and four vernier engines totalling 5,500 kgf. The characteristics indicate it was probably based on Kosberg's RD-0213 engine developed for the third stage of the UR-500K Proton launch vehicle. The stage, while having nearly the same diameter as the Proton third stage, differed in design, with a common bulkhead between the oxidiser and propellant tanks.
A fourth stage was designed to allow insertion of payloads into geosynchronous or lunar orbit. The propellants used and engine characteristics are identical to those of the experimental RD-280 engine developed by Glushko in the mid-1960's. The stage uniquely used the Aerozine-50 fuel developed in the United States for the Titan 2 ICBM. The engine was capable of four restarts.
The assembled vehicle would be moved by road from the Yangel factory in Dnepropetrovsk to the mouth of the Surya River. From there it could be moved on the Soviet Union's elaborate inland waterway system to any of the existing launch sites - Kaputsin Yar on the Volga, Baikonur on the Syr Darya, or Plesetsk on the Yemtsa. Kaputsin Yar, the closest to the factory, was the preferred location. At the launch site the vehicle would be moved to an austere launch pad a short distance form the river. After being put upright it would be enclosed by a service tower providing an environmentally protected environment for final rocket and payload preparation.
 | R-56 Transport Route - R-56 Transport Routes from the Yangel factory to the cosmondromes via the Soviet canal system. Credit: © Mark Wade. 88,000 bytes. 1 x 1 pixels. |
Yangel's KB Yuzhnoye was the prime contractor for the launch vehicle, with support from the Soviet Academy of Sciences, NII-88, NITI-40, GSPI, and the Ministry of Defence. By 1965 Yangel had decided that the bitter fight between Chelomei and Korolev over control of manned programs was damaging the Soviet space effort. In any case he could see that the size of the projects had reached such a scale that it was impossible for one design bureau to handle all of the required elements. He proposed a collaborative effort: Yangel would design and build the launch vehicle; Korolev the manned spacecraft; and Chelomei the unmanned spacecraft.
However this was not to be. The leadership was loath to change course with funds already invested in development of boosters and spacecraft by Chelomei and Korolev. The other Chief Designers objected that use of the R-56 for a manned lunar landing would require two R-56 launches in the place of one UR-700 or N1 launch. This would mean use of untried earth orbit rendezvous techniques to assemble the spacecraft in earth orbit. Development of the R-56 was not authorised, and for once in his career Yangel gave up the fight.
As a practical matter it was not possible for one bureau to handle the moon landing project. Although Glushko and Chelomei refused to co-operate with Korolev on the effort, most other rocket design bureaux were involved. Yangel found himself charged with development of the LK lunar lander that would actually land a cosmonaut on the moon.
 | R-56 test model - R-56 dynamic test model Credit: © Mark Wade. 12,695 bytes. 119 x 477 pixels. |
LEO Payload: 40,000 kg. to: 200 km Orbit. at: 90.0 degrees. Payload: 6,000 kg. to a: geosynchronous orbit trajectory. Liftoff Thrust: 2,368,000 kgf. Total Mass: 1,421,000 kg. Core Diameter: 6.5 m. Total Length: 67.8 m.
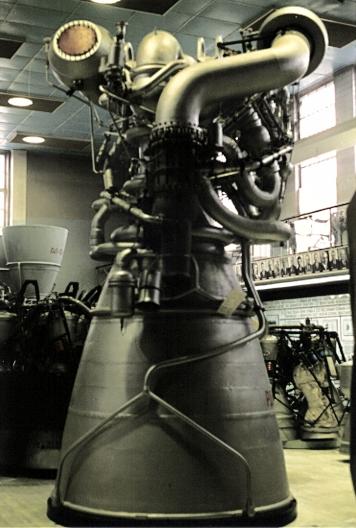 | RD-270 - RD-270 Rocket Engine - largest single-chamber engine ever developed in the Soviet Union. Credit: © Dietrich Haeseler. 36,023 bytes. 356 x 528 pixels. |
The GR-2 was to be a kind of enormous multiple-warhead FOBS (fractional orbit bombing system). Competitors included Korolev's N-11GR; Chelomei's UR-500; and Yangel's R-56
Decree 'On Important Development of Intercontinental Ballistic and Global Missiles and Carriers-Rockets for Space Objects--work on the N1, R-36, R-36-O, and R-56' was issued.
Decree 'On termination of work on the R-56 launch vehicle and on schedule of the testing for the N1' was issued.
Yangel had decided that the bitter fight between Chelomei and Korolev over control of manned programs was damaging the Soviet space effort. In any case he could see that the size of the projects had reached such a scale that it was impossible for one design bureau to handle all of the required elements. He proposed a collaborative effort: Yangel would design and build the launch vehicle; Korolev the manned spacecraft; and Chelomei the unmanned spacecraft. However the leadership was loath to change course with funds already invested in development of boosters and spacecraft by Chelomei and Korolev.